
|
| |
|
НПО Системы Безопасности (499)340-94-73 График работы: ПН-ПТ: 10:00-19:00 СБ-ВС: выходной  |
Главная » Периодика » Безопасность 0 ... 22232425262728 ... 48 восстановления, то элементы dj, i матрицы D характеризуют качество отказоустойчивой системы, выраженное в единицах времени. Пусть для определенности 2 2 30 3 1 20 , 3 2 10 112 2 С= 0,2 0.3 0,1 0,2 0,01 0,02 0,02 0,01 2,7 3,2 4,8 4,7 тогда D = BC= 3,4 3,7 6.5 6.4 . 3.5 3.8 6,4 6,5 При выборе в качестве оценки минимальных простоев системы
получаем, что наилучшей является первая структура, для каждой di,o== 2,7. Определяя аналогично do,/, получаем, что наилучшей является первая стратегия диагностирования и восстановления. Если ввести новое значение 0 при dc,i>S,5; при d,.;<3,5, то получаем модифицированную матрицу I I О О 1 О О ООО Нулям соответствуют неудовлетворительные стратегии и структуры отказоустойчивой системы. Поэтому «усеченная» матрица I 1 1 О описывает подмножество структур и стратегий обслуживания отказоустойчивой системы, удовлетворяющих заданным временным характеристикам. В частности, удовлетворительны- ми считаются первые две структуры и стратегии диагностирования и восстановления. Необходимо отметить, что с помощью матриц D, D" можно решать задачи расчета и оптимизации вариантов технических решений отказоустойчивых систем. Для проведения более полного анализа необходимо строить недетерминированные модели процесса контроля и диагностирования, которые позволяют проводить более полную оценку на основе использования методов моделирования и статистических характеристик работы системы. С учетом изложенного выше можно предложить следующий обобщенный алгоритм построения структур отказоустойчивых систем: 1. Выбрать и оценить различные виды структур взаимоконтроля по количеству связей, числу обнаруживаемых неисправностей. 2. Выбрать и оценить временные и аппаратурные затраты заданного множества допустимых для данных видов структур алгоритмов поиска неисправностей. 3. Оценить время восстановления элементов системы для выбранных алгоритмов поиска неисправностей. 4. Выбрать способ построения, алгоритмы поиска и восстановления, приводящие к минимальным затратам по обеспечению отказоустойчивости системы. Если получение такого минимума невозможно, то при заданных ограничениях на числовые значения одних характеристик добиться наименьших ватрат по другим характеристикам. 5. Если не все варианты структур рассмотрены, то перейти к шагу 1, изменив количество неисправных элементов или аварийных неисправностей системы. 6. Провести корректировку структуры взаимоконтроля или модификацию полученной структуры для снижения затрат на восстановление системы. .Исходя из требований диагностируемости, удается построить большое разнообразие структур взаимоконтроля, различающихся по сложности реализации связей, возможностям использования алгоримов диагностирования. Получаемые в процессе диагностирования результаты контроля могут существенно упростить структуру взаимоконтроля, если удается локализовать значительную часть неисправных элементов, либо, наоборот, могут привести к необходимости расширения количества связей с целью нахождения неисправностей (в частности, аварийных). Таким образом, возникает задача быстрой перестройки структуры систем. Зная, в частности, наибольшую кратность огказов, удается построить СВК, обеспечивающие локализацию неисправностей для группы или всех элементов системы. При оценке Систем удобно использовать аналитические способы построения СВК. обеспечивающие получение вариантов СВК G малыми затратами памяти и времени с помощью простых алгоритмов. Рассмотрим один из таких способов. Система S описывается Регструктурой, если связь контроля от элемента Vi к элементу Vj существует только в том 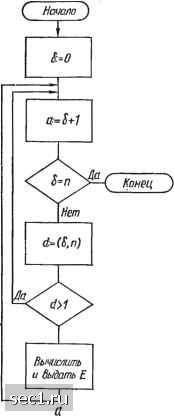  Рис. 18. Алгоритмы построения структур без восстановления (а) и Евклида (б) случае, когда j - i = Ьт (mod п), m = 1, t- (4.1) Система, для которой структура Вы удовлетворяет условию взаимной простоты чисел б и п, является диaгнocтиpyeмoй без восстановления I46J. Следовательно, при заданном значении количества элементов п = \ V\ существует множество СВК, удовлетворяющих требованию ДC. Исходя из соотношения (4.1) получение допустимых структур взаимоконтроля можно проводить перечислением всех взаимно простых чисел б и п. Поскольку все графы G == = G {V, Е) при фиксированных взаимно простых числах б и п являются изоморфными между собой, т. е. существует 0 ... 22232425262728 ... 48 |
||||||||||||||||||||||